
咨詢電話:13857285740

新聞中心
NEWS INFORMATION
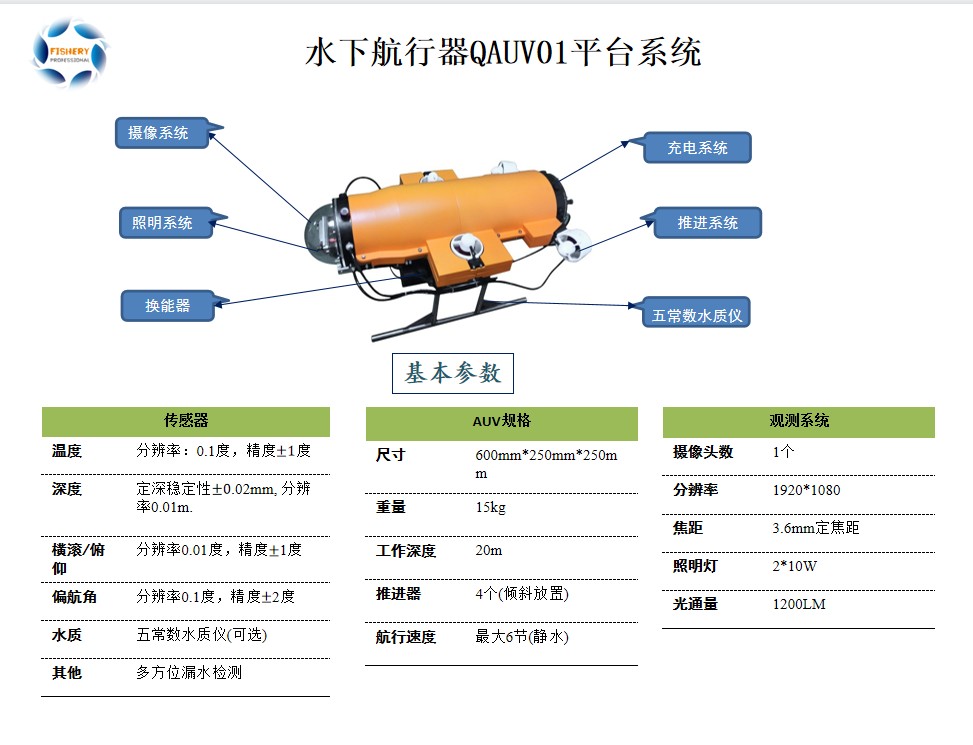
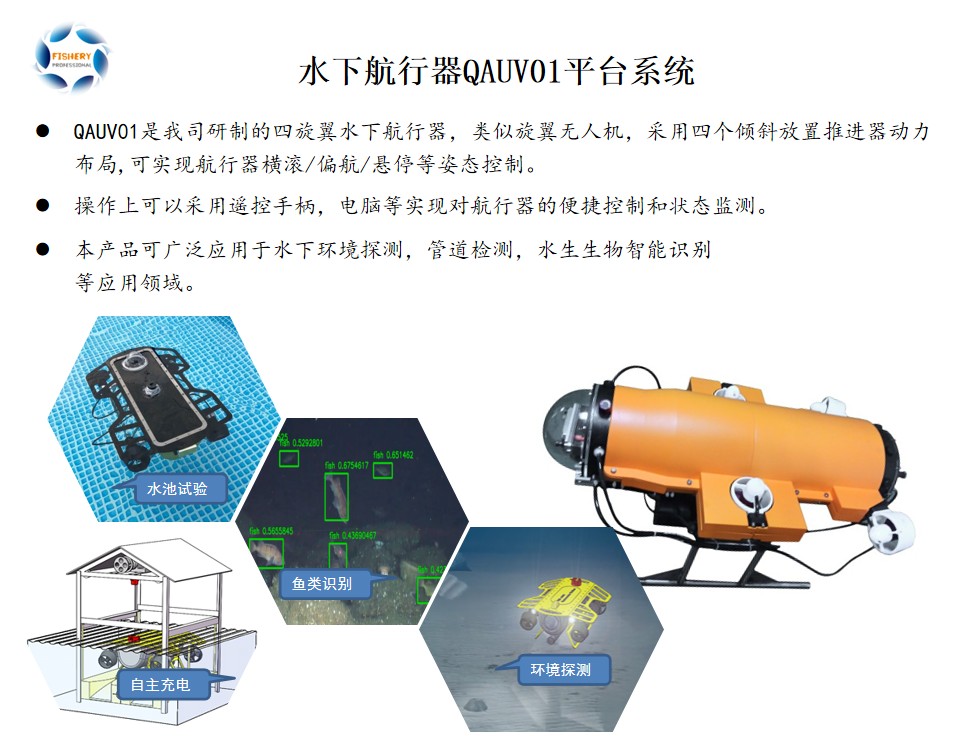
水下航行器QAUV01平臺系統(tǒng)
QAUV01四旋翼水下航行器類似旋翼無人機,,采用四個傾斜放置推進器動力布局,,可實現(xiàn)航行器橫滾、偏航,、懸停等姿態(tài)的控制,。操作上可以采用遙控手柄,電腦等實現(xiàn)對航行器的便捷控制和狀態(tài)監(jiān)測,。

QAUV01四旋翼水下航行器類似旋翼無人機,,采用四個傾斜放置推進器動力布局,,可實現(xiàn)航行器橫滾、偏航,、懸停等姿態(tài)的控制,。操作上可以采用遙控手柄,電腦等實現(xiàn)對航行器的便捷控制和狀態(tài)監(jiān)測,。
